Регулятор оборотов для 220В коллекторных электродвигателей
Схема симисторного регулятора-стабилизатора скорости 220-volt коллекторного двигателя на базе микросхемы U2008B с компенсацией
нагрузки
Что такое регулировка скорости электродвигателя, думаю, понятно всем, а вот что касается компенсации нагрузки, то – это процесс стабилизации
скорости вращения двигателя в зависимости от нагрузки на его валу.
К сожалению, 90% из приведённых в сети простых описаний регуляторов оборотов на микросхеме U2008B не содержит цепи компенсации нагрузки, что не позволяет
полностью реализовать возможности этой хорошо себя зарекомендовавшей ИМС.
Исправим эту несправедливость и опубликуем на этой странице схему модуля управления коллекторным двигателем, выпускаемого зарубежными коллегами и
лишённого данного недостатка.
А поскольку, как правило, такие конструкции не сопровождаются развернутым описанием, разъясняющим алгоритмы его работы и настройки, то исправим и этот пробел.
Регулятор скорости двигателя переменного тока
 Это простой и недорогой драйвер двигателя переменного тока с управлением скоростью и обратной связью по току на основе ИМС U2008.
Это простой и недорогой драйвер двигателя переменного тока с управлением скоростью и обратной связью по току на основе ИМС U2008.
U2008B разработана как схема управления фазой по биполярной технологии и позволяет определять ток, текущий через двигатель, а также регулировать
скорость с компенсацией нагрузки на валу.
Предпочтительными приложениями являются устройства, где необходимы блоки управления двигателем 220V (электрический инструмент,
вентиляторы, холодильники, соковыжималки, мясорубки, пылесосы и др.).
Технические характеристики:
- напряжение питания: 230 вольт переменного тока
- диапазон регулирования: 5…99%
- напряжение нагрузки: 230 В / 8 А (1,7 кВт с радиатором)
- максимальная мощность без радиатора 300 Вт
- низкий уровень помех
- стабилизация оборотов
- мягкий старт
- размеры платы: 50×60 мм
Схема регулятора скорости электродвигателя переменного тока:
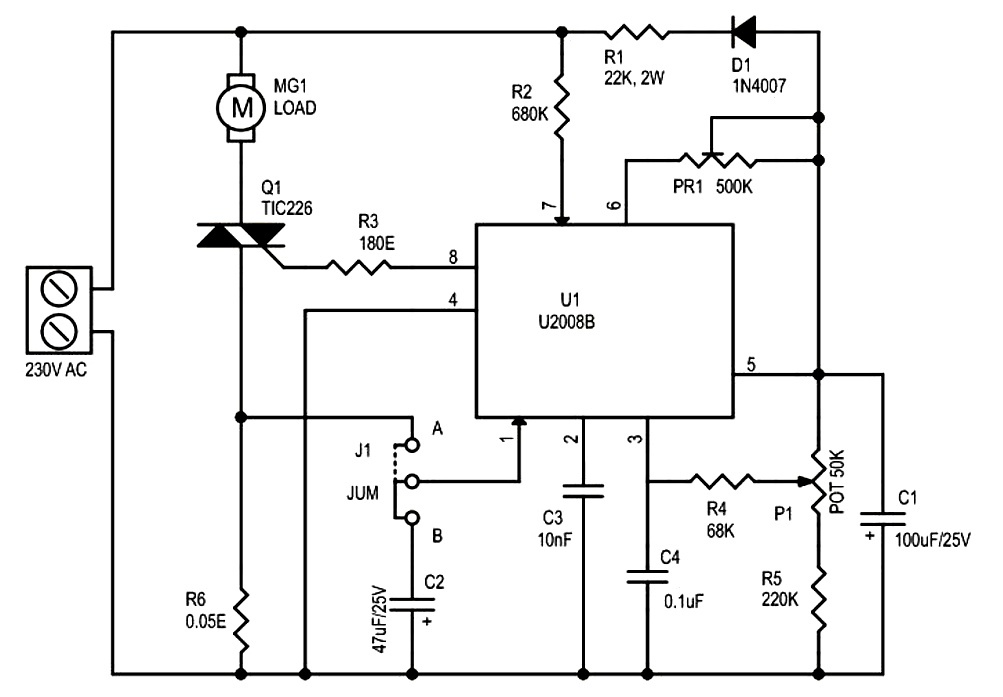
Рис.1 Схема регулятора и стабилизатора скорости вращения двигателя
Выбором перемычки J1 осуществляется: либо компенсация нагрузки на валу (точка А), либо плавный пуск электродвигателя (точка В).
Потенциометром Р1 регулируется скорость вращения электродвигателя.
Для получения напряжения питания микросхемы используется гасящий резистор R1 номиналом 22 кОм мощностью 2 Вт.
Диод D1 является однополупериодным выпрямителем погашенного R1 напряжения, а конденсатор C1, включенный между выводом 5 ИМС
и «землей» (вывод 4) – сглаживающим.
Это выпрямленное напряжение питания через подстроечный резистор PR1 подаётся на вывод 6 U2008, предназначенный для начальной установки угла φ открывания симистора.
Резистор R2 включен между сетевым напряжением ~220 В и входом VSYNC (вывод 7) и служит для синхронизации с напряжением сети.
Благодаря ему симистор открывается в момент перехода сетевого напряжения через ноль, что снижает помехи, создаваемые регулятором.
Импульсы для открытия симистора Q1 поступают на его управляющий вход с выхода ИМС (вывод 8) через резистор R3.
Теперь, что касается номинала токоизмерительного резистора R6.
Его значение необходимо рассчитать заранее, строго в соответствии с мощностью используемого электродвигателя по формуле: R6 = 55/Pдвиг.
Таким образом, для двигателя мощностью 100 Вт R6 = 55/100 = 0.55 Ом, для 500 Вт – 0.11 Ом, для 1000 Вт – 0.055 и т. д.
На следующем рисунке приведена печатная плата, а также показано расположение элементов на ней.
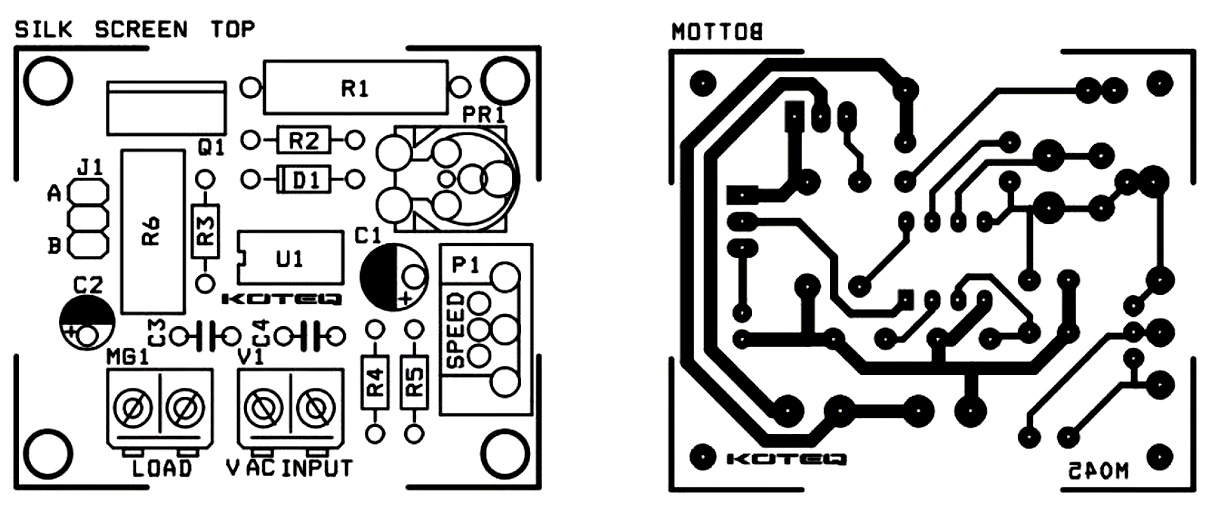
Рис.2 Печатная плата и расположение элементов для схемы регулятора
Настройка схемы:
Перед процессом настройки (а лучше сразу) вместо резистора R4 следует впаять на плату подстроечник номиналом 100 кОм.
Теперь можно переходить к собственно настройке.
1. Регулятор оборотов Р1 выставить на минимум.
2. При помощи подстроечного резистора РR1 выставить минимальные обороты, при которых после подачи питания двигатель будет работать
устойчиво.
3. Немного прибавить обороты двигателя. Увеличивая нагрузку на валу (например, зажимая его рукой), добиться подбором резистора R4 такого
состояния, при котором обороты двигателя будут стабильными и не зависеть от нагрузки на валу.
4. Повторно выставить регулятор оборотов Р1 на минимум. При необходимости подкорректировать положение подстроечного резистора РR1.
Так, путём нескольких последовательных итераций добиться значений резисторов, при которых двигатель на малых и средних оборотах будет
заметно "сопротивляться" торможению.
5. При желании – выпаять подстроечник, заменяющий R4, измерить его сопротивление и впаять не его место обычный резистор близкого номинала.
|


